
Excelで対象行列に対する固有値と固有ベクトルを算出するユーザー関数です。
Excelで主成分分析、慣性テンソルから主慣性モーメントなどを算出する際に使用できます。
VBAコード
Option Explicit
Function Eig(X As Object)
'Real Eigen Value by Jacobi method
'This function for Real symmetric matrix only
'original 6/14/2004 , modified 12/28/2004 ,modified 11/13/2024
'Y.Urita
'declaration
Dim i As Integer, j As Integer, N As Integer
Dim K_new As Integer
Dim i_rot As Integer, j_rot As Integer, K_max As Integer
Dim a() As Double, v() As Double
Dim b1 As Double, b2 As Double, b3 As Double
Dim Eps As Double, K_iter As Double
Dim ax As Double, v_cos As Double, v_sin As Double, v_tan As Double
Dim ev() As Double
'matrix size
N = X.Columns.Count
ReDim a(1 To N, 1 To N), v(1 To N, 1 To N), a2(1 To N), ev(1 To N, 1 To N + 1)
'define acceptable error rate
Eps = 10 ^ -16
'max itaretion number
K_max = 4000
'initialize matrix A()
For i = 1 To N
For j = 1 To N
a(i, j) = X.Cells(i, j).Value
Next j
Next i
'initialize matrix V()
'V : unit matrix
For i = 1 To N
For j = 1 To N
v(i, j) = 0
Next j
Next i
For i = 1 To N
v(i, i) = 1
Next i
'iteration for that all nondiagonal elements are 0
Do
K_iter = K_iter + 1 'add itaration number
K_new = 0 'flag :if nondaigonal elemnt has unacceptable error, flag was 1
ax = 0
'looking for maximum element and replace ax
For i = 1 To N
For j = i + 1 To N
b1 = Abs(a(i, j))
If b1 > ax Then
i_rot = i
j_rot = j
ax = b1
End If
Next j
Next i
If ax > Eps Then
K_new = 1
'calculate cosine and sine
b1 = a(i_rot, i_rot) - a(j_rot, j_rot)
b2 = -b1 - Sqr(b1 ^ 2 + 4 * ax ^ 2)
b3 = 2 * a(i_rot, j_rot)
v_tan = b2 / b3
v_cos = 1 / Sqr(1 + v_tan ^ 2)
v_sin = v_cos * v_tan
'rotate V vector
For i = 1 To N
b1 = v(i, i_rot)
v(i, i_rot) = v_cos * b1 + v_sin * v(i, j_rot)
v(i, j_rot) = v_cos * v(i, j_rot) - v_sin * b1
Next i
'rotate A matrix
For i = 1 To i_rot - 1
b1 = a(i, i_rot)
a(i, i_rot) = v_cos * b1 + v_sin * a(i, j_rot)
a(i, j_rot) = v_cos * a(i, j_rot) - v_sin * b1
Next i
For i = i_rot + 1 To j_rot - 1
b1 = a(i_rot, i)
a(i_rot, i) = v_cos * b1 + v_sin * a(i, j_rot)
a(i, j_rot) = v_cos * a(i, j_rot) - v_sin * b1
Next i
For i = j_rot + 1 To N
b1 = a(i_rot, i)
a(i_rot, i) = v_cos * b1 + v_sin * a(j_rot, i)
a(j_rot, i) = v_cos * a(j_rot, i) - v_sin * b1
Next i
'erase nondiagonal element
b1 = a(i_rot, i_rot)
b2 = 2 * v_cos * v_sin * a(i_rot, j_rot)
b3 = v_cos ^ 2 * b1 + b2
a(i_rot, i_rot) = b3 + v_sin ^ 2 * a(j_rot, j_rot)
b3 = v_cos ^ 2 * a(j_rot, j_rot) + v_sin ^ 2 * b1
a(j_rot, j_rot) = b3 - b2
a(i_rot, j_rot) = 0
a(j_rot, i_rot) = a(i_rot, j_rot)
End If
Loop While K_iter < K_max And K_new > 0
'output
For i = 1 To N
ev(i, 1) = a(i, i)
For j = 1 To N
ev(i, j + 1) = v(i, j)
Next j
Next i
'eigenvalue & eigenvector
Eig = ev
End Function
説明
ヤコビ法を使って、対称行列に対し回転行列で相似変換をします。
$$
\begin{bmatrix}cos\theta&sin\theta\\-sin\theta&cos\theta\end{bmatrix}
\begin{bmatrix}a_{11}&a_{12}\\a_{12}&a_{22}\end{bmatrix}
\begin{bmatrix}cos\theta&-sin\theta\\sin\theta&cos\theta\end{bmatrix}
=
\begin{bmatrix}a_1&0\\0&a_2\end{bmatrix}
$$
左辺を展開すると
$$
\begin{bmatrix}a_{11}cos^2\theta +2a_{12}sin\theta\cos\theta +a_{22}sin^2\theta&
a_{12}(cos^2\theta-sin^2\theta)+(a_{22}-a_{11}sin\theta\cos\theta\\
a_{12}(cos^2\theta-sin^2\theta)+(a_{22}-a_{11}sin\theta\cos\theta&
a_{11}sin^2\theta +2a_{12}sin\theta\cos\theta +a_{22}cos^2\theta\end{bmatrix}
$$
となります。
この非対角項を消去にするには
$$
a_{12}(cos^2\theta-sin^2\theta)+(a_{22}-a_{11})sin\theta\cos\theta=0
$$
を解くことになり、両辺をcos2θで割って整理すると
$$
tan\theta=\frac{-a_{11}-a_{12}\pm\sqrt{(a_{11}-a_{22})^2+4a_{12}^2}}{2a_{12}}
$$
となり、±を+で採用すると固有値は大きい順に並びます。
tanθが求まったことから、cosθとsinθが求まります。
$$
cos\theta=\sqrt{\frac{1}{1+tan^2\theta}}\\
sin\theta=cos\theta\tan\theta
$$
これで変換行列(回転行列)を求めることが出来ます。
この操作を非対角項全てに対して順番に繰り返し求めることで、最終的には固有値が求まります。また、逐次変換行列同士を掛けて行くことで固有ベクトルが求まります。
使い方
例えば、下記のような対称行列の固有値を計算してみます。
$$
\begin{bmatrix}4&1&2\\1&3&0\\2&0&5\end{bmatrix}
$$
3行4列の範囲を指定し、
=eig(行列範囲)と入力し、CTRL+SHIFT+ENTERを押します。
CTRL+SHIFT+ENTERはExcelで配列数式を扱う際の操作になります。
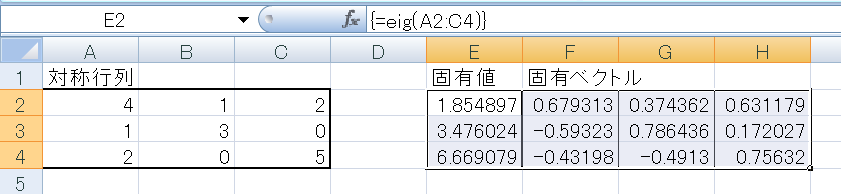
一番左の1列は、固有値
その右側の1列ずつ固有ベクトルとなります。
この例の行列の場合
固有値は
$$
1.854897309,3.476023603,6.669079088
$$
固有ベクトルは
$$
\begin{bmatrix}
0.679313061948559&0.374361954852286&0.63117896877609\\
-0.593233311996296&0.786435698692206&0.172026536791294\\
-0.431981482709593&-0.491296263553547&0.756320024866686
\end{bmatrix}
$$
となります。
参考資料
CQ出版社、VisualBasicによる固有値計算&振動解析プログラム、黒田英夫著
なお、現在は絶版となっていて、古本はプレミアの値段がついてしまっています。
コメント